平面四杆机构设计
图解法
设计的基本思想
对于四杆机构来说,当其较链中心位置确定后,各杆的长度也就确定了.用作图法设计四杆机构,就是利用各较链之间相对运动的几何关系,通过作图确定各较链的位置,从而定出各杆的长度。
四杆机构图解设计的实质:用作图法确定各较链中心的位置的问题
中垂线原理:
连杆的运行时是圆周摆动,通过三点两线的中垂线可以相交得到连杆旋转的圆心。
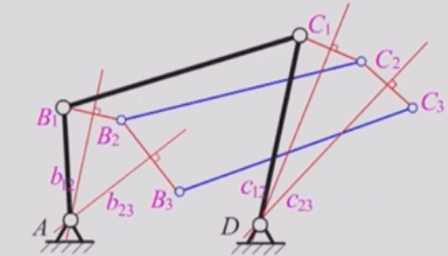
例题1:已知活动较链B、C的3个位置,确定固定较链A、D位置。作图依据: A、D分别为B、C所在轨迹圆弧的圆心。
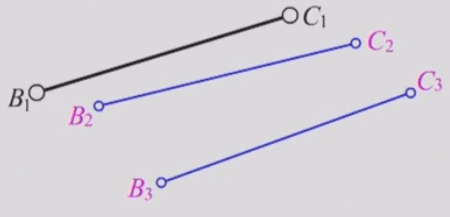
作图方法:
1)分别作连线B1B2和B2B3 的中垂线b12、b23,其交点即为A的位置;
2)同理可求D的位置;连接AB1、C1D,即得所求四杆机构AB1CiD。
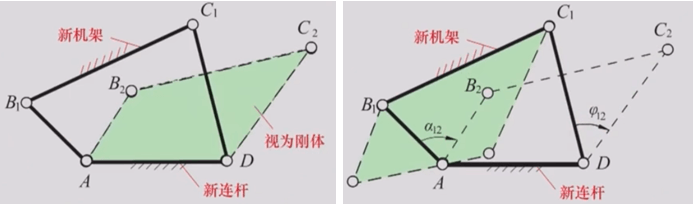
机构倒置原理:
已知固定较链A、D 位置,确定活动较链B、C 位置机构倒置原理: 若改取机构的原连杆BC为机架,原机架AD为连杆,则A、D就变为活动饺链,而B、C变为固定较链了。
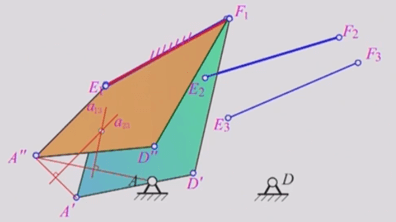
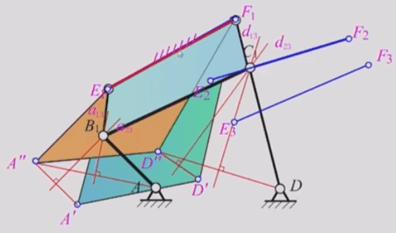
例题2:已知固定较链A、D 位置。设已知A、D 的位置,及连杆上的标线EF 在机构运动过程中,分别占据E1F1、E2F2、E3F3三个位置。现要求确定两活动较链中心B、C的位置。
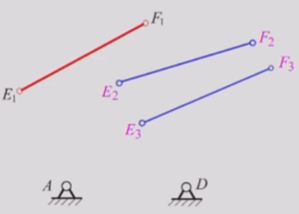
作图方法:
1)以EiFi为机架作机构倒置,作出4、D另外两个位置4、D及A”、D”
2)由4、4、A”三点确定圆弧的圆心Bi点,D、D、D”可求得Ci点
3)连接AB1、BC及CD,即得所求四杆机构ABiCiD。
按给定连杆预定N位置设计四杆机构的求解条件
当N=3 时,有唯一解;
当N=2 时,有无穷多解。此时可根据其他条件选定一个解;
当N=4 时,可能有解或无解,若重选B;位置,可能有无穷多解
反转法原理:
取机构原连架杆CD为机架,则连架杆AB变为连杆,进行机构倒置。这样,将原求活动饺链C的位置问题转化为求固定饺链C的问题。这种方法称为反转法或机构反转法
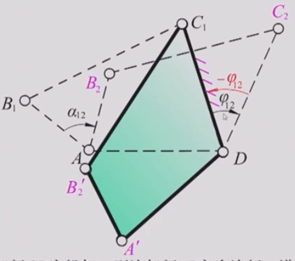
例题3:已知两连架杆两对对应角位移
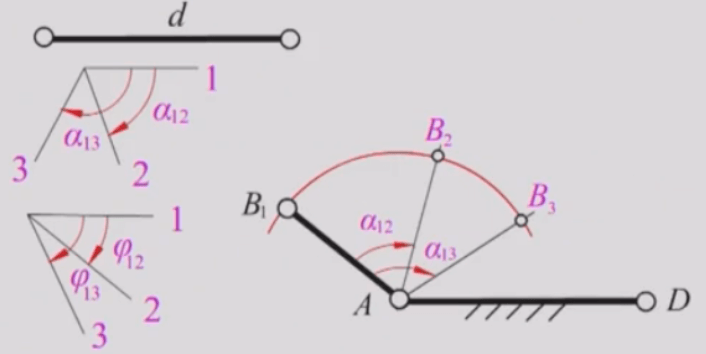
作图方法:
1)先由d 定出位置A、D,适当取AB长度及位置AB1,作位置AB2、AB3;
2)为确定C,采用反转法原理,作连线B2D 及B3D,并分别绕D点反转φ12及-φ13角,可得B2’及B3’;
3)由B1、B及B;确定C1位置。
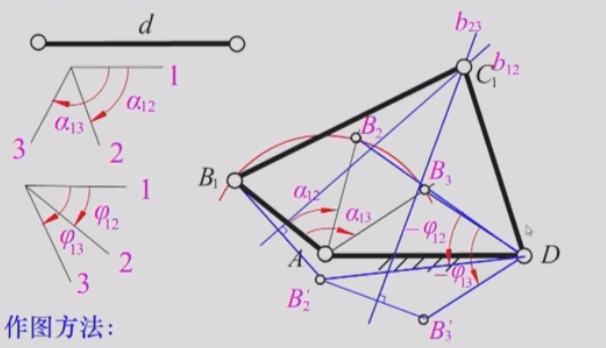
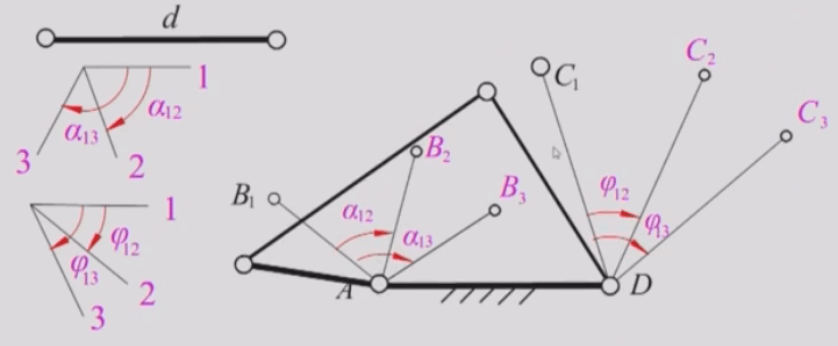
当已知两连架杆两对对应角位移时,因杆AB的长度及其初始位置AB为任选,故有无穷多解。
解析法
在用解析法设计四杆机构时,首先需建立包含机构各尺度参数和运动变量在内的解析式,然后根据已知的运动变量求机构的尺度参数。
方法特点 :
可借助于计算器或计算机求解,计算精度高,适应于对三个或三个以上位置设计的求解,尤其是对机构进行优化设计和精度分析十分有利。